21. Multiple Integrals in Curvilinear Coordinates
d. Integrating in 2D Curvilinear Coordinates
1. Grid Cells
The Polar coordinate system is the most common curvilinear coordinate system in 2D, but there are many others. Several of their coordinate grids are shown below.
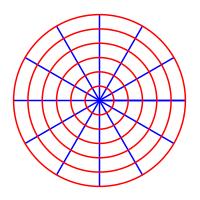
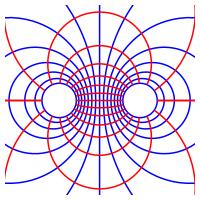
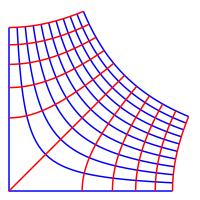
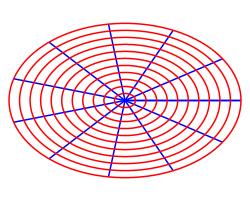
We know how to integrate in polar coordinates. We would like to know how to integrate in other 2D coordinate systems as well. Throughout, we will use polar coordinates as a concrete example.
Coordinate System
To specify a coordinate system, we need to give the position \((x,y)\) as a function of the curvilinear coordinates.
Polar coordinates are given in components by \[ x=r\cos\theta \qquad y=r\sin\theta \] or as a single vector equation for the position: \[ (x,y)=\vec{R}(r,\theta)=\left\langle r\cos\theta,r\sin\theta\right\rangle \] Once we specify the values of \(r\) and \(\theta\), we know the rectangular coordinates \(x\) and \(y\).
General curvilinear coordinates are given in components by: \[ x=x(u,v) \qquad y=y(u,v) \] or as a single vector equation for the position: \[ (x,y)=\vec{R}(u,v)=\left\langle x(u,v),y(u,v)\right\rangle \] Once we specify the values of \(u\) and \(v\), we know the rectangular coordinates \(x\) and \(y\).
Coordinate Grid and Coordinate Curves
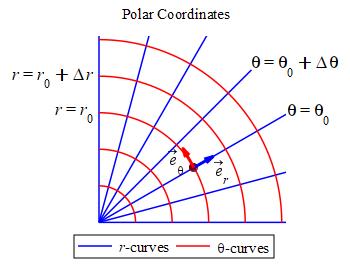
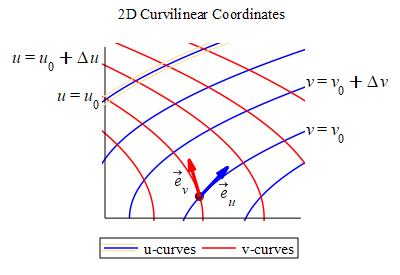
Here is a piece of the polar coordinate grid and of a general curvilinear coordinate grid:
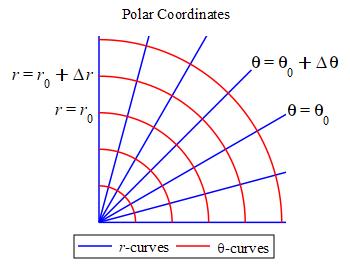
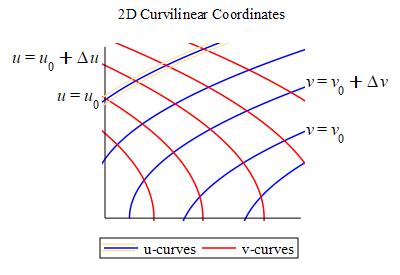
There are two families of coordinate curves that define the edges of a grid cell (or coordinate box) in 2D.
In polar coordinates, the radial lines (blue)
are called \(r\)-curves because \(r\) is changing,
while the circles (red) are called
\(\theta\)-curves because \(\theta\) is changing.
The \(r\)-curve with \(\theta=\theta_0\) is
\(\vec{R}(r,\theta_0)=(r\cos\theta_0,r\sin\theta_0)\) with \(r\) as
the parameter.
The \(\theta\)-curve with \(r=r_0\) is
\(\vec{R}(r_0,\theta)=(r_0\cos\theta,r_0\sin\theta)\) with \(\theta\) as
the parameter.
In the general curvilinear coordinates, there are:
\(u\)-curves
(blue) on which \(u\) is changing and
\(v\)-curves
(red) on which \(v\) is changing.
The \(u\)-curve with \(v=v_0\) is
\(\vec{R}(u,v_0)=(x(u,v_0),y(u,v_0))\) with \(u\) as the parameter.
The \(v\)-curve with \(u=u_0\) is
\(\vec{R}(u_0,v)=(x(u_0,v),y(u_0,v))\) with \(v\) as the parameter.
Coordinate Tangent Vectors
For a parametric curve \(\vec{r}(t)=(x(t),y(t))\), the velocity or tangent vector is \(\vec{v}=\dfrac{d\vec{r}}{dt} =\left\langle \dfrac{dx}{dt},\dfrac{dy}{dt}\right\rangle\), i.e. we differentiate the position with respect to the parameter. If we need to specify the choice of parameter, we would write \(\vec{v}_t=\dfrac{d\vec{r}}{dt}\). When dealing with a curvilinear coordinate system, the tangent vectors to the coordinate curves no longer have the interpretation as velocity. Further, for a coordinate system, we no longer want to use the letter \(v\) for the tangent vector, first because it is not a velocity and second because we are using \(v\) as one of the coordinates \((u,v)\). So from now on we write \(\vec{e}_t=\dfrac{d\vec{r}}{dt}\) for the tangent vector to a curve \(\vec{r}(t)\).
When dealing with a curvilinear coordinate system, the tangent vector along each coordinate curve is found by differentiating with respect to its parameter. Since the other coordinate is held fixed, these are partial derivatives.
For polar cordinates, \(\vec{R}(r,\theta)=\left\langle r\cos\theta,r\sin\theta\right\rangle\) the coordinate tangent vectors are: \[ \vec{e}_r=\dfrac{\partial\vec{R}}{\partial r} =\left\langle\cos\theta,\sin\theta\right\rangle \quad \text{and} \quad \vec{e}_\theta=\dfrac{\partial\vec{R}}{\partial\theta} =\left\langle-r\sin\theta,r\cos\theta\right\rangle \] Here, \(\vec e_r\) is the tangent vector to an \(r\)-curve found by holding \(\theta\) fixed and \(\vec e_\theta\) is the tangent vector to a \(\theta\)-curve is found by holding \(r\) fixed at \(r=r_0\).
For general curvilinear coordinates, the coordinate tangent vectors, are: \[ \vec{e}_u=\dfrac{\partial \vec{R}}{\partial u} =\left\langle \dfrac{\partial x}{\partial u},\dfrac{\partial y}{\partial u}\right\rangle \quad \text{and} \quad \vec{e}_v=\dfrac{\partial \vec{R}}{\partial v} =\left\langle \dfrac{\partial x}{\partial v},\dfrac{\partial y}{\partial v}\right\rangle \] Here, \(\vec e_u\) is the tangent vector to a \(u\)-curve found by holding \(v\) fixed and \(\vec e_v\) is the tangent vector to a \(v\)-curve is found by holding \(u\) fixed.
The coordinate tangent vectors are added to the coordinate grid plots below at the point \((r_0,\theta_0)\) for the polar plot and at \((u_0,v_0)\) for the general curvilinear plot.
Heading
Placeholder text: Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum